Fire Extinguisher Robot
by Mechatronics_VUB in Circuits > Arduino
795 Views, 0 Favorites, 0 Comments
Fire Extinguisher Robot

Fires are still a widely known problem. Not only in houses, but also in industrial environments there is a constant threat of a breakout. Until this day, these fires have to be extinguished by firefighters. Consequently, these firemen are in grave danger when on-duty. Imagine losing a beloved one as he performs his job! The solution for this problem is the following. This project's subject is the design of a fire extinguisher robot, which is a prototype of a full scale robot which can potentially serve to carry out firefighting missions. This robot is able to detect smoke, locate a fire and autonomously extinguish it. This allows fire departments to focus on a safer and less demanding fire extinguishing strategy.
Table Of Contents
- Supplies
- Project Motivation
- Functional Analysis and Requirements
- Conceptual Design
- Embodiment Design
- Subsystem Design
- Mechanical Systems
- Circuitry
- Software
- Integration Guide
- Demo Project
- Project Review
- Sustainability
- Bill Of Materials
- Team Presentation
- Project Repository
Supplies
- Arduino Uno
- 4x 12V DC Motors
- 12V Peristaltic Pump
- 2x L298N H-Bridge Motor Driver
- 2x HC-SR04 Ultrasonic Sensor
- 4x IR Photodiode
- MQ-2 Air Quality Sensor
- 8x 100 kΩ Resistor
- 4x NPN Transistor
- 5V, 12V Battery
- Breadboard
- M-M, F-M Jumper Wires
- Water Reservoir
- 2x Water pressure nozzles
- M3 Bolts, Nuts
- Velcro Straps
Wheels, chassis and nozzle mount were constructed using the following:
- 3D-Printer
- Lasercutter
Project Motivation


Although safety regulations and better fire security products are released every year, house fires as well as industrial fires are still very present in the daily life. As reference measurements, Belgium and the United Stated statistics can be reviewed. A study by VRT stated that in the last 10 years there have been a number of 548 domestic fires. These fires resulted in a number of 636 deaths, which is an enormous amount considering the size and Belgian population. In the United States, graph shows the evolution of the amount if fires in recent years. The increase in fires is due to several factors, the presence of wood and absence of asbestos among them. Now to extinguish these fires human intervention to this day is the primary type of solution. But this also brings along a lot of risk. US Fire Administration released a report in which 94 firefighters lost their life in 2022. In the scheme it is visible that the majority of these firefighters die on duty, just as expected. Following this research, it is clear that fires and fire fatalities are a major problem. To solve this, our own Fire Extinguisher Robot is the solution.
The usage of such a fire fighting robot can drastically reduce the amount of firefighter deaths and human intervention, because the robot will assist or replace firefighters in carrying out dangerous operations. In conclusion, the main objective of our product is to give communities a greater sense of security, for both firefighters and civilians. In order to release a product, it is essential to define the persona, that is who will be buying and using the product. primary buyers of this technology will likely be governmental organizations or umbrella entities responsible for public and industrial security. These could include fire departments or industrial safety agencies. Secondary buyers could be individual companies. The robot is autonomous and for this reason there is no direct user to be defined who operates it manually. However, the nuance can be made that personnel responsible for the robot’s maintenance and surveillance will interact with it to ensure its functionality. The people who benefit from the robot are the individuals in close vicinity of any fire risk.
Functional Analysis and Requirements
 17.11.04.png)
Functional Analysis
Based on the motivations of the project and the case uses of the robot, a need identification of the needs can be developed.
Objective needs:
Flame Detection
A system capable of detecting flames at varying distances, with sensitivity to different flame intensities and wavelengths, ensuring precise identification of fire sources in diverse environments.
Fire Extinction
An advanced actuator-based system designed to initiate and control extinguishing actions using water or other agents, optimized for effectiveness and minimal resource consumption.
Obstacle Evasion
A navigation system equipped with sensors to detect and avoid obstacles, ensuring uninterrupted operation. It adapts to dynamic environments to maintain efficiency in fire-extinguishing tasks.
Adjustable Water Pressure
A flexible design concept that enables the robot to dynamically adjust water expulsion pressure. This adaptability allows for effective extinguishing at varying distances while minimizing water wastage.
Fire Resistance
The robot uses materials resistant to extreme heat and flames, ensuring durability and consistent functionality even in high-temperature zones. This enhances its reliability in intense fire scenarios.
Water Storage
A robust and insulated water storage system that not only holds sufficient quantities but also ensures thermal and electrical isolation from other components to prevent malfunctions.
Energy Efficiency
A power management system designed for optimal energy usage, ensuring extended operation during missions without frequent recharging or refueling.
Environmental Adaptability
The robot integrates advanced sensors and algorithms to adapt to different environmental conditions, such as smoke-filled areas, low visibility, or extreme heat, ensuring reliable performance in all scenarios.
Requiriment list:
The requirement list in Table 2.1 above , outlines the constraint categories, specifying the robot’s requirements
along with the corresponding metric units. The "Level" column defines the target values the robot must
meet. Lastly, the "Importance" column ranks the priority of each criterion on a scale from 1 (lowest priority)
to 5 (highest priority).
The requirement list serves as a comprehensive framework to ensure the fire-extinguishing robot meets
its functional, operational, and environmental needs effectively. Each category has been carefully defined
to address key aspects such as geometry, kinematics, control, detection, resistance, power management,
and financial feasibility.
Conceptual Design




Robot Functional Overview
The robot is designed to perform the following functions: movement, flame detection, obstacle detection, and water spraying. Each function plays a key role in shaping the design choices:
- Movement: Determines the mobility design of the robot.
- Flame Detection: Guides the selection of sensors for fire identification.
- Obstacle Detection: Requires the integration of sensors to prevent collisions.
- Water Spraying: Influences the choice of components for the extinguishing system.
Design Considerations
Mobility
A four-wheel configuration was selected for the mobility function due to its simplicity and robustness. While directional wheels offer greater maneuverability, they were excluded to avoid added complexity and potential structural vulnerabilities. The fixed-wheel design provides durability and aligns with the prototype’s objectives. This configuration is specifically optimized for navigating rough terrains, such as debris-filled environments in fire-affected buildings, while maintaining reliability and straightforward construction.
Fire Detection
Infrared (IR) sensors were chosen for flame detection based on their cost-effectiveness and simplicity of integration. These sensors offer a dependable solution for detecting heat and flames without requiring complex setup or calibration.
Obstacle Detection
Ultrasonic sensors were selected for obstacle detection due to their affordability and ease of integration. These sensors are effective for identifying and avoiding obstacles in dynamic environments.
Water Spraying System
A pump without a servo motor for directional aiming was chosen for the water spraying function. This option reduces cost and complexity while meeting the project’s functional requirements. Water was selected as the extinguishing agent due to budget constraints, providing a practical and efficient solution for this prototype.
Concept Comparison
- Concept 1: This concept features a robot with tracks and a nozzle capable of aiming at the fire. It employs IR sensors and ultrasonic sensors. This design most closely represents the envisioned final product.
- Concept 2: This concept uses a robot with four fixed, non-directional wheels and a nozzle that does not aim at the fire. It also incorporates IR sensors and ultrasonic sensors. This design offers a less expensive approach while remaining optimized for the testing conditions.
Chosen Concept
The selected concept is Concept 2: a robot with four fixed, non-directional wheels, a nozzle that does not aim at the fire, and IR and ultrasonic sensors. This concept was chosen as it balances cost-effectiveness, simplicity, and alignment with the prototype’s objectives.
Embodiment Design

The goal of this project is to design and develop a prototype of a smoke detection and fire extinguishing robot using PLA (Polylactic Acid) and wood as the primary materials. The robot is intended to navigate through indoor environments, detect smoke and fire, and extinguish fires using a water-based system.
4.1 Design Overview:
The robot prototype consists of the following components:
- Chassis and Body: Made from wooden plates (5mm thick) with a rectangular shape (420mm x 200mm x 125 mm). The chassis provides a sturdy base for the robot and houses the electronic components. The body is designed to be lightweight and provides a protective cover for the electronic components.
- Wheels: Made from PLA Material (70mm diameter) with PLA printed hubs. The wheels are designed to provide traction and stability for the robot.
- Smoke Detection System: Utilizes an MQ-2 gas sensor and an Arduino Uno microcontroller to detect smoke and fire.
- Fire Extinguishing System: Consists of a water tank, pump, and nozzle. The system is designed to extinguish small fires using a water-based solution.
4.2 PLA Printed Components
The printed components were the Wheels, Pump support and the IR sensor support.
4.3 Wooden Components
Our main wooden components were the Chassis and Body of robot made up by wooden plates which were
Sides, Front, Top and base plates provided a sturdy base for the robot and houses the electronic components.
4.4 Electronic Components:
- Arduino Uno: Utilized as the microcomputer for the smoke detection and fire extinguishing systems.
- MQ-2 Gas Sensor: Used to detect smoke and fire.
- Water Pump: Used to pump water from the water tank to the nozzle.
- Motor Drivers: Used to control the movement of the robot.
4.5 M.S.A. (Material Selection Analysis.)
>Design requirements.
Body construction for support platform for the purpose of robot prototyping.
>Materials selection criteria.
Relatively good stiffness to weight ratio.
>Candidate materials.
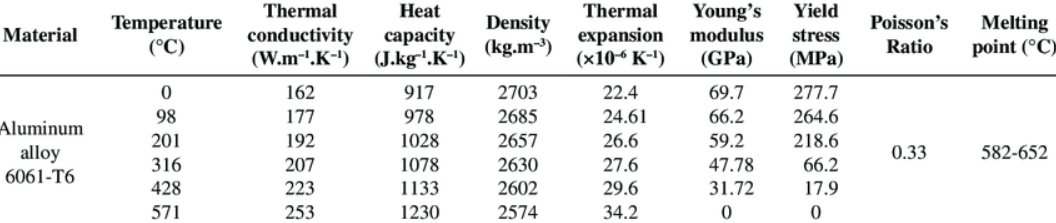
Aluminum Alloys.
Pros: Lightweight. High strength to weight ratio. Corrosion-resistant. Relatively inexpensive.
Cons: Less stiff compared to composites.
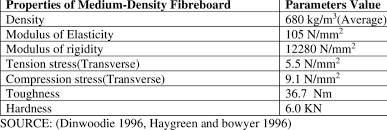
MDF.
Pros: Readily available. Moderate strength to weight ratio. Lightweight. Inexpensive.
Cons: Flammable. Less stiff compared to composites.
ABS Plastic Sheets
Pros: Lightweight. Easy to machine and 3D print. Cost-effective.
Cons: Lower stiffness and load-bearing capacity.
>Evaluation of candidate materials.
Aluminum.
MDF
>Selection of materials.
MDF: Due to the constraints of the project and the nature of the stage of evaluation (prototyping) the selection of MDF has been made due to the relative ease of acquisition and the malleability given to the construction with this material given by its ease to be modified with simple tools.
M.P.S. (Manufacturing process selection.)
>Evaluation of possible processes:
- High grade machining: Not feasible, lack of tools, space and time.
- Molding: Impossible, lack of tools.
- 3-D printing: Not sustainable for the whole product, discarded.
- Middle grade machining: Possible, presence of laser cutter and hand machining tools makes this a possibility.
Selection - Middle grade machining.
Subsystem Design








A. Mechanical System
Requirements
The mechanical systems are the medium by which the robot performs actions, be it by command or by simple continuum. To perform the needs established, these mechanical components need to follow a set of criteriums too follow:
- Mechanical motion (mobility): The robot requires the capacity to displace in space by itself.
- Mechanical motion (pump-action): The robot requires a system to propel its content to perform the action of fire extinguishing.
- Structural functionality: The robot requires the mechanical property of conservancy. This means to be able to stand by itself for a prolonged period of time.
- Modular components attachment: The design of the mechanical elements of the robot require the need for the addition of electronic devices to perform its functions.
Mechanical constraints.
The system needs to be auto sufficient when performing the tasks for which it has been designed, but an important consideration to take is the lifetime of this system. If a poor construction is set for this system then the robot will not perform well overall and the whole project could be considered as a loss for such a matter.
The mechanical construction of the chassis needs to also take into account the addition of mass and dimensions given by the electronic components, for such a matter we need to define the manner by which they will be attached as well.
It is also given that the forces for the motion will be performed by electromechanical components, but the manner in which it will be exerted is a matter for the mechanical design of components for translation, wheels.
Proposal for needs.
- Mobility - The matter of motion will be performed by motor drivers, but the manner by which they will perform it will be through a torque exerted upon wheels of our own design.
- Pump-action - The kinetic propulsion of the liquid in store is resolved by another electromechanical component similar to the motors used for the motion of the robot, an electromechanical pump attached to a rubber hose.
- Structural construction - The attachment of different panels can be made through pure kinematic boundaries with the use of the mechanical property of strain. The way in which this is achieved is by the force joining of MDF panels through screws and bolts welded into small but sturdy ‘joints’.
Repository for the CAD: here
Final construction.
The design of the system can be found on the annex as well as through the next steps which show the whole construction of the system with the integration of the electronic elements. Those which are explained as follow:
B. CIRCUIT
1.Requirements
The electronics is the part that is responsible for the behavior of the robot. To accomplish the required range of functionality, there are some requirements to be met and accordingly the electronics are implemented. A list can be made:
- Smoke detection: The robot needs to be able to detect the presence of smoke from a certain distance.
- Flame detection: To locate a fire, a tool is needed to measure the flames.
- Object evasion: Evasion of object in the way is a requirement.
- Mobility: Our robot needs to be able to move around.
- Autonomous: There can be no interaction between the robot and bystanders.
- Water propulsion system : A pump is required to enable a water jet that can be activated once flames are detected.
2.Design process and consideration of components :
The electronics is the part that is responsible for the behavior of the robot. To accomplish the required range of functionality, there are some requirements to be met and accordingly the electronics are implemented. A list can be made:
- Smoke detection: The robot needs to be able to detect the presence of smoke from a certain distance.
- Flame detection: To locate a fire, a tool is needed to measure the flames.
- Object evasion: Evasion of object in the way is a requirement.
- Mobility: Our robot needs to be able to move around.
- Autonomous: There can be no interaction between the robot and bystanders.
- Water propulsion system : A pump is required to enable a water jet that can be activated once flames are detected.
This functionality implies the design of five electronic subsystems, each dedicated to a specific task. These subsystems must be carefully integrated and managed to ensure cohesive operation. For instance, the system must be capable of activating the pump when the flame detector surpasses a predefined threshold, while simultaneously managing mobility and object evasion. Such coordination is critical for the robot's proper functioning.
I. Flame detection - Infrared sensor
As an infrared sensor, we selected an infrared photodiode, model WL-TDRB THT Photodiode Round Black, which is suitable for detecting light in the infrared spectrum.The WL-TDRB THT Photodiode is optimized for detecting infrared radiation, specifically within a wavelength range of 750 to 1100 nm, with peak sensitivity at 940 nm. It exhibits a typical photo current of 9 to 30 µA under standard illumination. It has a viewing angle of 45°, the photodiode allows for targeted detection.
Due to several factors, an electronic circuit was required to interface the photodiode with the Arduino. This circuit is essential because the photodiode generates a very weak current that is difficult for the microcontroller to read directly. The circuit amplifies this signal using a BC548 transistor, converts it into a measurable voltage, and conditions the signal to make it more stable. Additionally, it polarizes the photodiode to ensure optimal detection and protects the Arduino by limiting the signal to a safe voltage range.
A photodiode operates in photoconductive mode, meaning it generates a current proportional to the intensity of the light it captures, provided it is appropriately polarized. In forward bias, the photodiode allows electrons to move freely, facilitating the measurement of the signal generated by light absorption. Two resistors were added, one at the emitter of the transistor and the other at its base. The values were chosen by testing several resistors until achieving effective detection. A 200 Ω resistor was placed on the emitter to stabilize the transistor's gain through negative feedback and so ensuring the circuit's stability.
A 200 kΩ resistor was added to the base to properly polarize the transistor. This value provides sufficient base current to keep the transistor in its active region without risking saturation, allowing for linear amplification of the signal produced by the photodiode. The circuit is shown in figure 5.1.
II. Object evasion - Ultrasound sensors :
The HC-SR04 ultrasonic sensor was used for obstacle detection. It operates by emitting a 4 kHz ultrasonic pulse and measuring the time taken for the pulse to reflect off a surface and return to the Echo pin. This sensor works under an operating voltage of 5V and have an energy consumption of 0.075 mVA/hrs. The output of the sensor is digital and knowing that the time required for the signal to make a round trip corresponds to the sensor output, the distance separating the obstacle from the sensor can be calculated as follows :
d = 0,5 x (t x c )
Since the operating voltage of this sensor is 5V this device has been connected directly to the Arduino board without intermediate circuit as shown in the figure 5.2.
III. Smoke detection - Air quality sensor :
MQ-2 Air quality sensor is chosen and the and the main reasons are its capability to detect more than one type of gas and the compatibility with the Arduino. Additionally, a potentiometer was included, allowing us to calibrate the alert threshold. During multiple tests to fine-tune this device, we occasionally observed erroneous readings. To address this and obtain more reliable results, we decided to eliminate white noise by implementing a moving average technique. This approach involves calculating the average of values within a sliding window, effectively reducing rapid variations caused by noise.
IV. Mobility - DC motors :
For propulsion of the wheels, different types of motors our possible, stepper- and DC-motors being the obvious ones. Because of the weight of the robot (due to water in reservoir,...) a powerful 12V DC motor was chosen, preferring continuous strong movement over accuracy.
After selecting the type of motor, we considered how to control these motors to enable the robot to move in the desired directions, including turning in any direction and moving in reverse.
To turn the robot in a specific direction, the wheels on the opposite side must rotate faster than those on the side toward which the robot is turning. This requires varying the current supplied to each motor depending on the wheel’s position on the robot. Additionally, to enable the robot to move in reverse, it is necessary to reverse the polarity applied to the motors, thereby changing the rotation direction of the DC motors.
To address these requirements, we decided to use H-bridges, which allow control of both the speed and the direction of the motors’ rotation. The circuit of this subsystem can be seen in figure 5.3.
V. Water propulsion system - Pump :
For the water jet system, a peristaltic pump was selected due to its reversible operation, allowing fluid to be pumped in both directions. The pump is powered by 12V motors connected to H-bridges, which enable polarity reversal at the motor level. This design allows the motor to rotate in the desired direction, effectively controlling the flow direction of the pump but also to control the water flow.
This bidirectional capability is particularly advantageous, as it enables us to refill the water reservoir without the need to physically remove it from its position. By reversing the pump's operation, water can be drawn into the reservoir directly, enhancing the robot's operational efficiency. We also added nozzles to precisely direct the water jet towards our target (the fire to be extinguished). The circuit of this subsystem is shown in figure 5.4.
3.Final circuit diagram
The final circuit can be found in the Figure 5.0 . There all connections and hardware can be observed, as connected to the Arduino for optimal communication. Before assembling the full circuit, it is recommended to test every element separately first. The next step is then to test the different subsystems if they are functioning correctly. Videos of tests of the different subsystems are provided in annex. A list of the exact components used is given in the section 'Supplies'.
During to test of each subsystem stage, each of the various components was programmed and tested independently in the initial phase. This approach allowed us to calibrate and set the specific thresholds for the different sensors. It was observed that the maximum distance at which flame detection was optimal was 35 cm. For the obstacle sensor, objects could be detected at distances of up to 40 cm. The water pump produced a water jet with a maximum range of approximately 13–14 cm. The robot's movement was programmed to enable forward and backward motion as well as turning in various directions.
C. Code and flow diagrams for sub systems:
The flow diagrams illustrate the sequential actions undertaken by the robot during fire extinguishing operations. The process begins at a designated starting point, where the robot is activated upon detecting smoke or flames. It then navigates toward the source of the fire while simultaneously avoiding obstacles, ensuring an efficient and safe path to extinguish the flames.
This can be seen in the figures 5.5, 5.6 and 5.7.
Integration Guide


Synthesis.
The complete construction of the system is centered around our microcontroller board, the Arduino UNO. As the center locus for the processing of information and the relaying of instructions based on our program we need to define how each subsystem will operate and be connected with these constraints.
Motion.
As stated before, the motion of our system is given by a set of four DC motors connected in parallel to an H-bridge circuit which act as its control element, while the four wheels are mounted to the frame of our robot by the connection of smaller plaques to the motors and the whole frame.
The H-bridge is a component with 6 pins allotted to its control:
- Two pins are allotted to the manipulation of the load fed to the system, on a percentage basis.
- Four binary pins are allotted to the control of the direction of the load to the two output terminals on each hemisphere.
Mounting the wheels to the frame to later connect them to their respective hemisphere in the H-bridge will constitute the integration of the mobility element for our system.
Maneuvering.
The components in charge of allowing for a maneuvering action are a set of ultrasonic sensors. These are placed in a configuration facing off to the sides, so the emitter and receptor that make up the sensor can be better used to detect and avoid any obstacles through defining a minimal tolerance of time for the return of the emitted signal.
The connection to the arduino is done through two pins of signals (output and input) and the necessary connections for energy allowed in the 5V grid.
Fire detection.
The components in charge of allowing for the detection of active fires is done through a spectrum analysis with the focus of trying to identify infrared traces of infrared radiation, a common emission of flames.
The integration of this component was made through the construction of a circuit plaque connected to an NPN transistors in order to define a current control as the current tends to sink in the collector in these types of transistors.
There is a set of four sensors connected to the central unit. Of these three are directed to the front and set up at different directions for maximum coverage while a redundant sensor is installed on the back to allow for the tracking of any flames in that blindspot.
The protocol used by the sensors to track and follow the origin of the reading is mainly to turn the whole system in one single direction before moving towards it until the reading of the front sensor reaches a level above a certain threshold.
Fire extinguishing.
The system responsible for the act of fire containment and eventual extinction works mostly on the principle of the following components:
- IR sensor (Front radiant.)
- DC motor (Pump.)
The DC motor like before is controlled through an H-bridge expressly defined for one particular functionality to control the flow of liquid through the pump. Be it for the fire propulsion or for reservoir refill.
This, in addition to the Ir sensor, allows for the propulsion of water once a fire enters the threshold of detection. And like before, the integration to the central unit follows the once stated previously for the motion and fire detection.
Demo Project




Quick starter guide
The maintenance personal, must verify that the following steps.
- Reservoir is full load with water.
- The distinguishing code is loaded.
- Place the robot in the action zone.
- Power the robot.
After a full set of actions, the robot should be recharged with the aid of the maintenance personal. Following the next steps.
- Turn off the robot.
- Change the code to refill code.
- Power the robot.
- Refill the reservoir whit water.
- Verify the first 4 steps.
Project Review
Project review.
The project was performed to a satisfactory manner in the field of embodiment and execution but it was also hindered by time constraints that manifested due to the need to redesign and reintegrate different elements of the system.
The manufacturing and assembly was the step that took most time as it was necessary to reevaluate both mechanical and electronic components of the robot and as such they had to be modified for a better performance. This extra time used for the construction of the robot hindered the capacity to test each electronic component as they worked in tandem despite the previous testing of each subsystem separately.
The project overall allowed for the performance and improvement of each member’s skills while also showing the areas that require improvement in a personal manner.
Sustainability
Sustainability.
Positives:
- The construction of the robot proved to be sturdy enough for continued use.
- The electronic elements worked as expected, a further improvement in their programming can be more beneficial.
- The maneuvering works well enough for a quick displacement in large areas.
- The materials used proved to be cost-effective on a production scale.
Negatives:
- The subsystems lacked the perfect integration needed for a satisfactory performance.
- The materials used were not properly isolated, this may bring forth issues with natural elements.
- The electronic wiring can be improved through the use of PCBs in such a manner that its connection to the central control unit can be done seamlessly.
- The use of MDF is directly related to the tree harvesting industry which is negative for the environment.
- An unregulated use of electrical energy is also related to issues with the power acquisition, bad for the environment.
Bill of Materials

This materials list outlines all necessary components for our project, with an emphasis on functionality and cost-efficiency. The inclusion of essential components like sensors, an Arduino board, and structural materials like PLA filament and MDF ensures the successful construction of the Smoke Detection and Fire Extinguishing Robot.
Team Presentation
We are students of MA1 for electromechanical engineering through BRUFACE, Group #2.
The group is composed by a half international student and half (ULB-VUB) students, listed below are the members and the duties performed by each:
Massenzio Argurio - CAD design, mechanical assembly and water propulsion design. Favorite part: CAD design and assembly.
Sten Magnus - Protocol programming, sensor testing, motor testing and code integration. Favorite part: Seeing some result after all the sweat.
Dounia Sayed - Sensor construction, sensor programming, sensor testing and CAD design. Favorite part: Sensor programming.
Luis Pedro M. - Electronic mapping, wiring, protocol programming and testing. Favorite part: Programming.
Deogratius Nong - Report documentation. Favorite part: Materials selections and Bills
Mauricio Valdez O. - Robot design, electrical testing and robot assembly. Favorite part: Assembly and wiring.