Obstacle Avoidance Robot for Carrying Heavy Payload
483 Views, 2 Favorites, 0 Comments
Obstacle Avoidance Robot for Carrying Heavy Payload

This is an obstacle avoidance robot built to carry my son's rocker.
Prepare the Parts

Parts
- DC Brushed Motor Controller : https://amzn.to/2vAlmKz
- Motor : https://amzn.to/2GY9Vl3
- Arduino : https://amzn.to/2V4fio8
- Ultrasonic sensor : https://amzn.to/2PNmR1l
- Battery : https://amzn.to/2HxULVa
- 3D printed sonar mount : https://www.thingiverse.com/thing:3650451
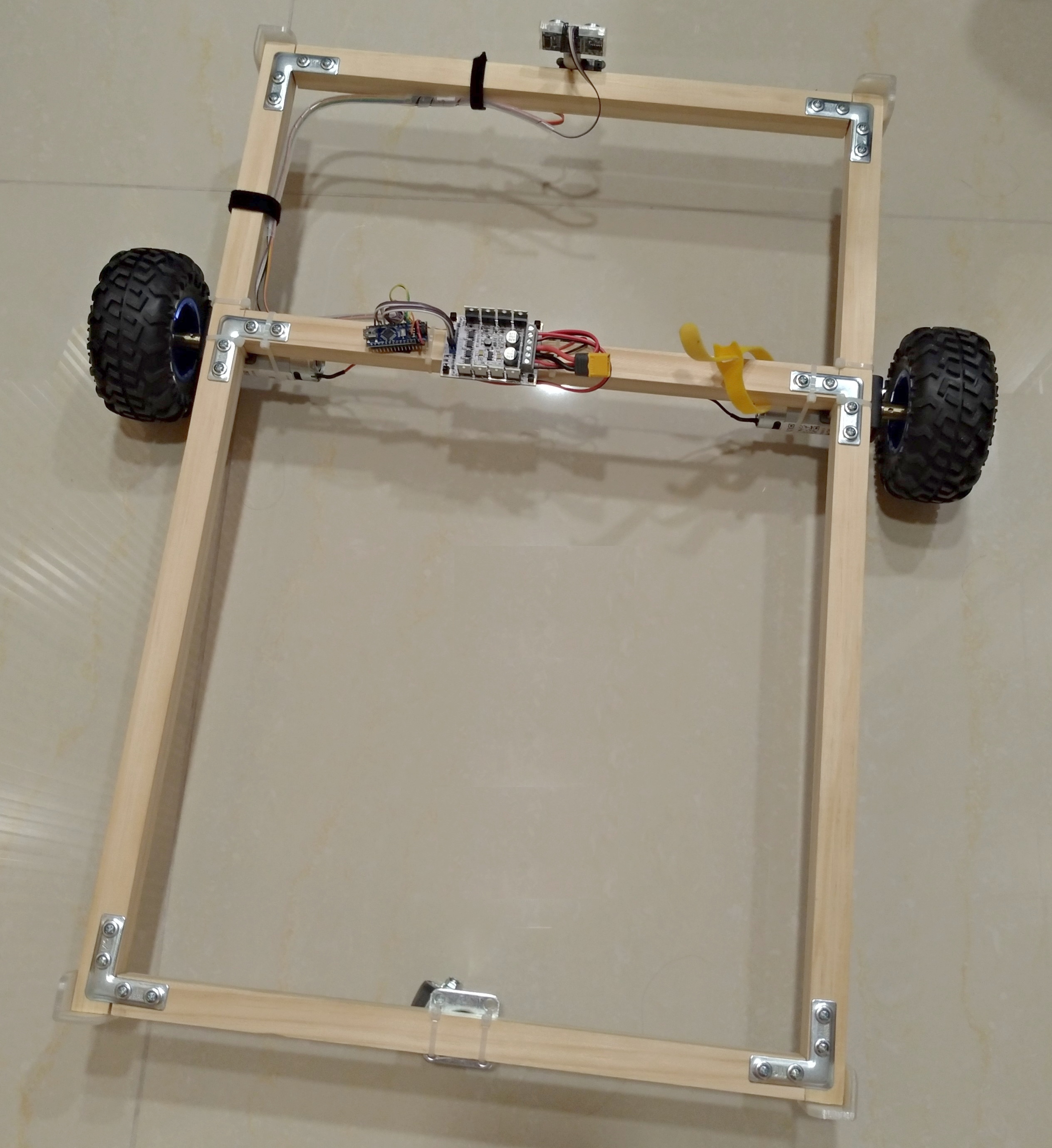
Assemble the Main Frame


I use 2.3 x 2.3 cm square wood rods for the main structure, they are screwed together using repair brackets such as https://amzn.to/30Ga31J on both sides. The center spar is for mounting electronics parts.
Install Main Wheels

Install main wheels with zip ties, works surprisingly well compare to screws. Securing motors with zip ties absorbs the bending moment the main wheel induces on L shape motor mounts.
Install Rear Wheel

Install rear wheel, also with zip ties.
Assemble the Ultrasonic Range Sensor (HC-SR04) and Servo

Use a rubber band to hold the sensor in place and a M3 screw to mount the whole module onto the servo. 3D printed parts can be found here.
Connect Everything


Connect the electronics components according to the diagram below.
Motor controller command
╔═══════╦════╦════╗
║ ║ A1 ║ A2 ║ ╠═══════╬════╬════╣ ║ Break ║ 0 ║ 0 ║ ╠═══════╬════╬════╣ ║ FWD ║ 1 ║ 0 ║ ╠═══════╬════╬════╣ ║ REV ║ 0 ║ 1 ║ ╚═══════╩════╩════╝
*PA is PWM input which controls motor RPM
.