DIY Ping Pong Blaster!

Ok, let's be honest. Is there any real need for a ping pong ball machine gun? No. But then again, is there any real need for a water gun? No. Both are definitely great for pranking friends or to spook intruders or pesky wild life! Regardless, in this Instructable, I'll show you how to make a ping pong ball machine gun using the parts from an old RC car.
If you aren't into reading, feel free to watch this video instead (shameless plug for my Youtube channel).
The Inspiration

The idea for this project stems from two things:
- A spare remote control car
- An automatic pitching machine.
If you've ever been to a batting cage, you've seen those automatic pitching machines. They're basically two wheels that spin very fast, and when a baseball is passed between them, it propels it forward, pitching it to you. Given that I had an old RC car that I wanted to find another use for, I thought that recreating this type of pitching machine for ping-pong balls would be a great project.
The idea is extremely simple: Take the two motors and wheels from the RC car and position them side by side with just enough space to force a ping-pong ball through it. To make it more functional, we could add a motion sensor to make it automatic, but this isn't supposed to be a difficult project. It's purely intended to be a lesson in re-imagining the technology you have around you. If you stripped down an RC car to it's basic parts, how would you re-imagine those parts? What would you make? What would you do with them? This is just one of the many possibilities. Let's get started!
Taking Apart the RC Car

I'm using a cheap RC Car called the Thunder Tumbler. You can find it for less than $10, and it has some great, salvageable electronic parts inside of it! It has regular Phillips head screws and is very easy to disassemble, revealing the control board. Then removing a few more screws, you can separate the back wheels and the back wheel motors. Unless you accidentally disconnected any wires, you should still be able to put the batteries back in and use the remote to activate the wheels.
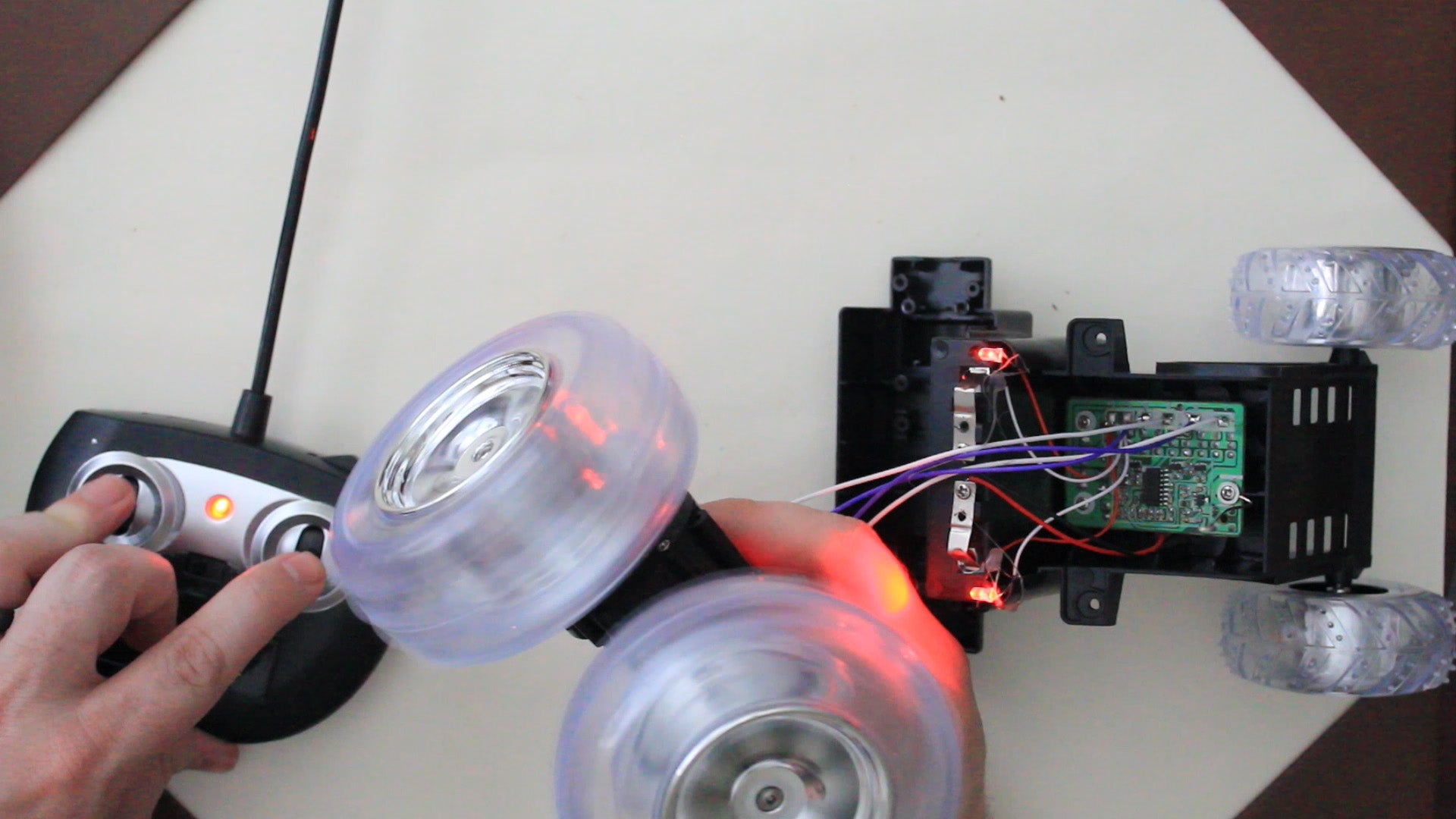
Verifying that it still works, you can unscrew and remove the control board from the chassis. The motor, wheels, and control board should be all we need for this project. You can desolder any extra wires (such as LED's) to make things less cluttered.
Mounting the Motors


Adding Motion Detection

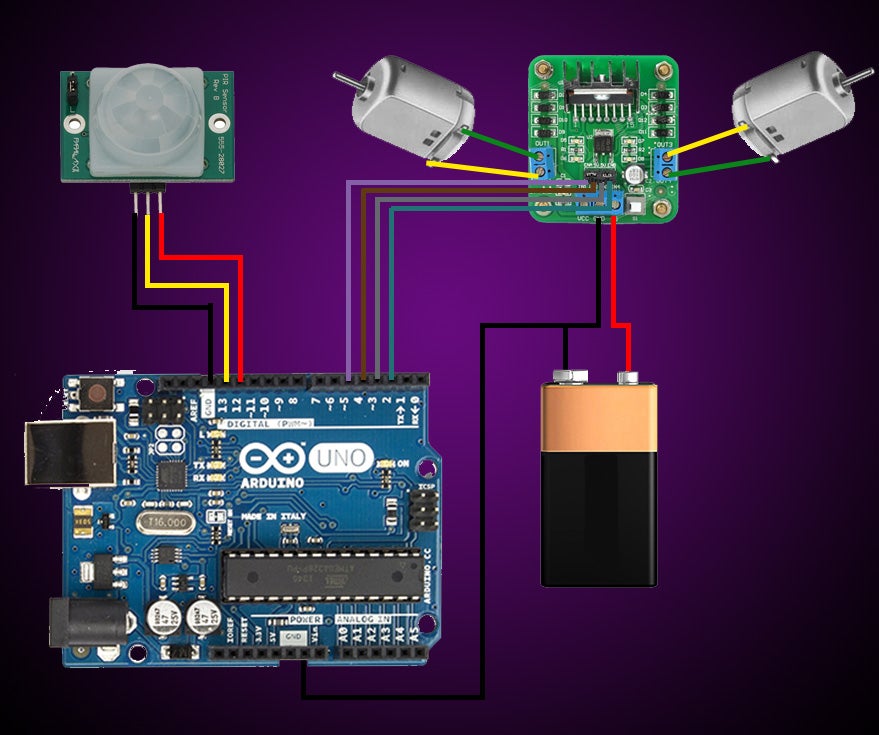
Up until now, you should be able to make this entire project using what you've sourced from the RC car. But to take it to the next level, we can add an Arduino and a motion detector. To have the Arduino control the motors, we'll need to add some type of motor controller. You could use a series of resistors, diodes, and transistors, but I actually had an h-bridge dual motor controller that I'll be using. You can connect it to the motors, to an external power supply for the motors, and to the Arduino (pins 2-5). Take a look at the diagram below for details on how to connect it.
For detecting motion, I'm using a PIR (Passive Infrared) Motion Sensor. It has three pins, ground, a trigger pin, and a VCC (power) pin. I connected them to GND, 13, and 12 on the Arduino respectively. Again, refer to the diagram below for details.
/*
* PIR sensor tester
*/
int pirPin = 13;
int inputPin = 12;
int pirState = LOW;
int val = 0;
#define FORWARD 8
#define BACKWARD 2
#define STOP 5
int Motor[2][2] = //two dimensional array
{
{2 , 3}, //input pin to control Motor1--> Motor[0][0]=4, Motor[0][1]=5
{4 , 5}, //input pin to control Motor2--> Motor[1][0]=6, Motor[1][1]=7
};
void setup() {
pinMode(pirPin, OUTPUT);
pinMode(inputPin, INPUT);
pinMode(Motor[0][0], OUTPUT);
pinMode(Motor[0][1], OUTPUT);
pinMode(Motor[1][0], OUTPUT);
pinMode(Motor[1][1], OUTPUT);
digitalWrite(pirPin, HIGH);
}
void loop(){
val = digitalRead(inputPin); // read input value
if (val == HIGH) { // check if the input is HIGH
motor_run(0, FORWARD);
motor_run(1, FORWARD);
} else {
motor_run(0, STOP);
motor_run(1, STOP);
}
}
void motor_run(int motor, int movement) {
switch (movement) {
case FORWARD:
digitalWrite(Motor[motor][0], HIGH);
digitalWrite(Motor[motor][1], LOW);
break;
case BACKWARD:
digitalWrite(Motor[motor][0], LOW);
digitalWrite(Motor[motor][1], HIGH);
break;
case STOP:
digitalWrite(Motor[motor][0], LOW);
digitalWrite(Motor[motor][1], LOW);
break;
}
}Testing It Out/Finishing Touches
